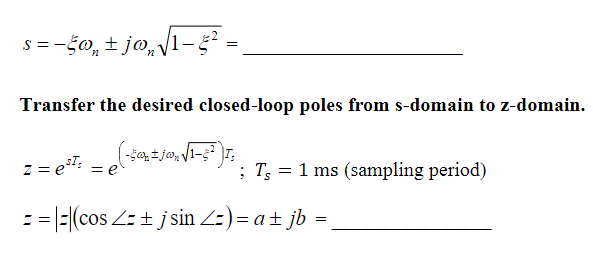
Question 1: Determine the desired closed-loop poles in the s-domain based on the damping ratio and natural frequency of the system that you have calculated in PART 1.
Use MATLAB to plot the root locus based on the motor transfer function)(GTP that you have obtained in PART A Q4 (without compensator)
Print the root locus with only the P-controller and with the PID controller (with
compensator) and comment on the difference between them. Write two different scripts/m-file for this and compare the two different results, and comment on its stability.
Hire a Professional Essay & Assignment Writer for completing your Academic Assessments
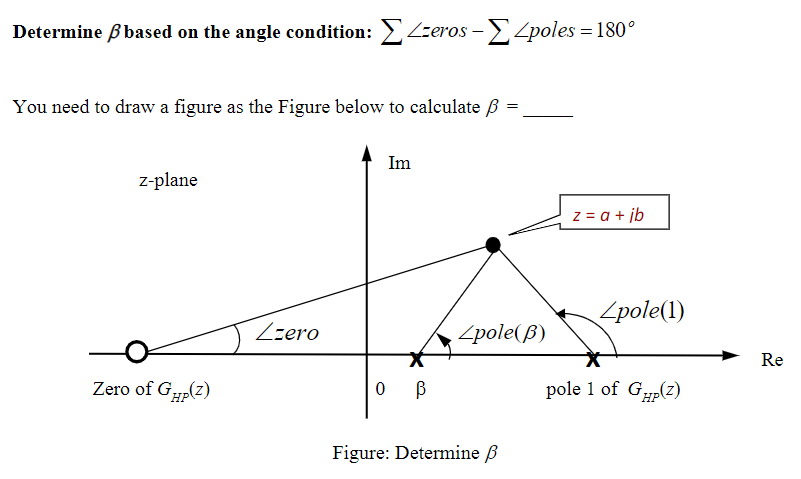
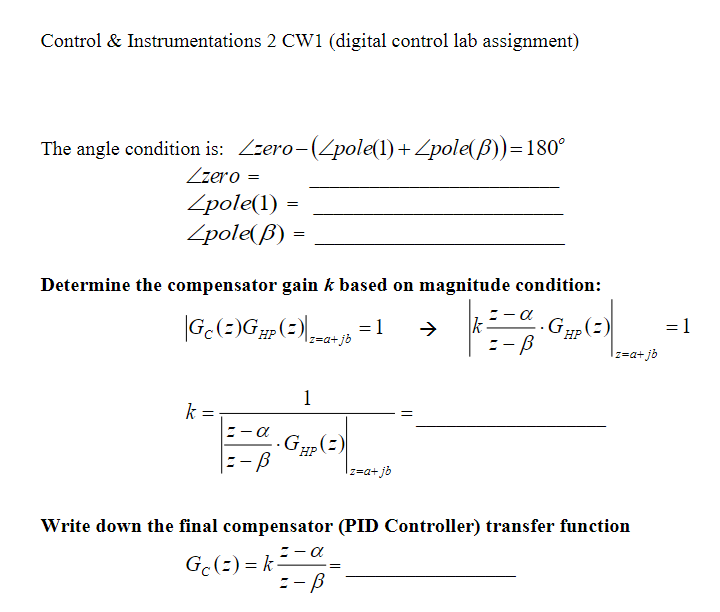
Question 2: Select the compensator zero to cancel one pole of)(zGHP {other than z=1}.
a = _______________
Buy Custom Answer of This Assessment & Raise Your Grades
Question 3: Simulate your system and the results Followings are required for this part:
• Final system block diagram (use the Simulink block diagram)
• Simulation result (overview) from Simulink
• Enlarged simulation curve clearly shown the overshoot and settling time (Simulink)
• Complete m-file listing in this part C.
Question 4: derive the state space representation of the system with the new PID controller Use Matlab to acquire the state space representation for the new transfer function G(z) (using PID compensator)
Write a simple m-file code to apply the unit step and get the output result for this new transfer function and compare these results with your results in Part B (using only the P controller).
Stuck with a lot of homework assignments and feeling stressed ?
Take professional academic assistance & Get 100% Plagiarism free papers
The post 306SE Control systems Assignment, SUTD, Singapore: Determine the desired closed-loop poles in the s-domain based on the damping ratio and natural frequency appeared first on My Assignment Help SG.
Need help with your own assignment?
Our expert writers can help you apply everything you've just read — to your actual assignment.
Get Expert Help Now →